Eine der grundlegendsten Entscheidungen bei der Automatisierung eines Laserprozesses ist die Wahl zwischen einer robotergestützten oder einer portalbasierten Bewegungsplattform. Beide bieten unterschiedliche Vorteile, und keine der beiden ist universell besser.
Die richtige Wahl hängt von mehreren Faktoren ab. Dazu gehören die Art des Prozesses selbst, der erforderliche Durchsatz, die zulässigen Kosten und verschiedene Integrationsbeschränkungen.
Hier erklären wir Ihnen, wie Roboter- und Portal-Lasersysteme funktionieren, und gehen auf ihre wichtigsten Vor- und Nachteile ein. So können Sie die beste Wahl für Ihre eigene Anwendung treffen.
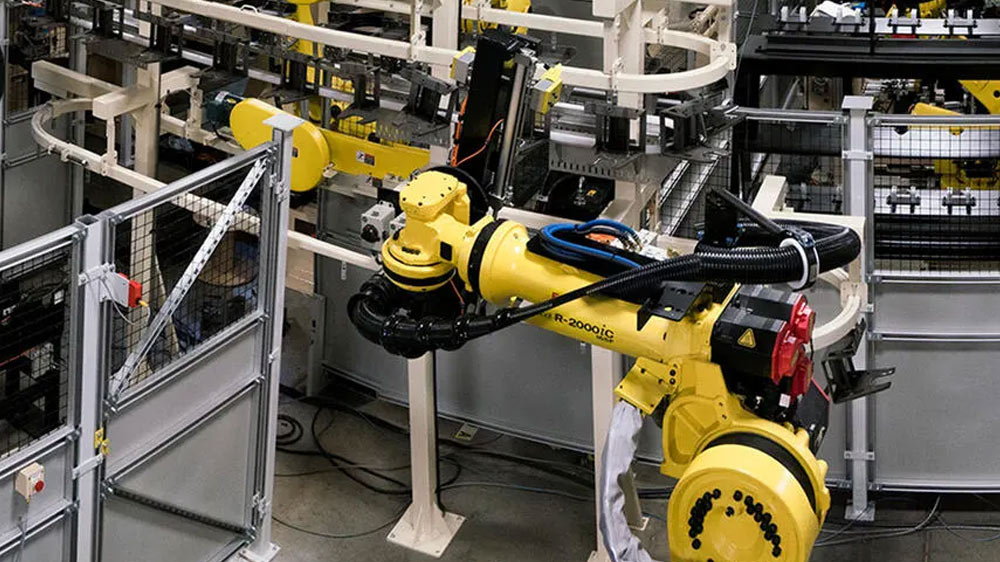
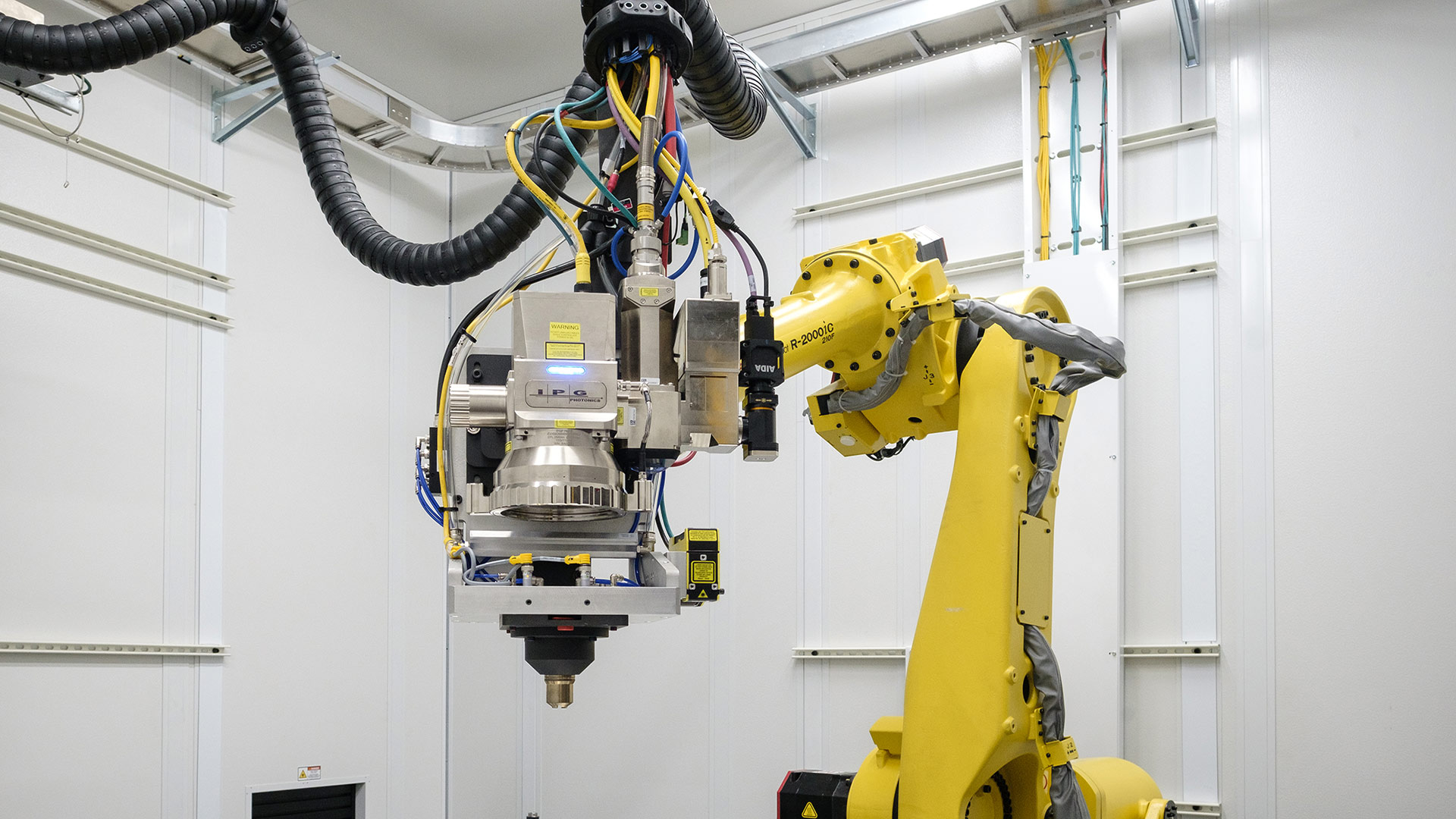
Roboter-Lasersysteme
Bei dieser Form der Automatisierung wird ein mehrachsiger Industrieroboterarm verwendet, um einen Laserbearbeitungskopf in Bezug auf Teile zu bewegen. Der Roboterarm folgt einer programmierten Bahn, und dank seiner Fähigkeit, den Kopf in bis zu sechs Freiheitsgraden zu bewegen, kann er Laserbearbeitungen in einer Vielzahl von Positionen und Ausrichtungen in Bezug auf das Teil durchführen.
Der Laser selbst kann am Ende des Roboterarms angebracht sein oder über Glasfaserkabel von einer stationären Quelle dorthin geleitet werden. Die in das End-of-Arm-Tooling (EOAT) integrierte Strahlführungsoptik kann je nach Prozess Festfokusoptiken, Wobble-Köpfe oder Scanköpfe umfassen.
In einigen Systemen werden Teile an Werkzeugen befestigt, die auf einer festen Basis oder einem Drehtisch montiert sind. Alternativ kann der Roboterarm neben einem Fördersystem für die Inline-Produktion positioniert werden. In diesem Fall kann die Armbewegung mit dem Teil koordiniert werden, und zusätzliche Positionierer – wie beispielsweise eine Neigungs- oder Drehachse – können verwendet werden, um den Zugang zu verbessern oder eine konsistente Strahlausrichtung aufrechtzuerhalten.
Portal (kartesische Bewegung) Lasersysteme
Gantry-Lasersysteme verwenden eine Bewegungsplattform, um entweder den Laserstrahl oder das Werkstück entlang linearer X-, Y- und (manchmal) Z-Achsen zu bewegen. Die Bewegung folgt einer programmierten Bahn, die von geraden Linien bis zu Kurven reichen kann. Der Winkel des Strahls bleibt jedoch in der Regel fest und steht typischerweise senkrecht zur Werkstückoberfläche.
Bei den meisten Portalsystemen befindet sich der Laser außerhalb des Portals und wird über Glasfaserkabel zugeführt. Die Strahlführungseinrichtung am Portal kann je nach Verfahren Festbrennweitenobjektive, Wobble-Köpfe oder Scanköpfe umfassen. Die Verwendung eines Scankopfes ermöglicht On-the-Fly-Bearbeitungsfunktionen (OTF), die besonders für das Hochgeschwindigkeits-Laserschweißen im laufenden Betrieb nützlich sind.
Portalsysteme werden häufig auf Arbeitsplattformen aus Stahl oder Granit errichtet. Dies bietet eine äußerst stabile Grundlage, um Präzisionsarbeiten zu ermöglichen.
Entscheidungsfaktoren
Die verschiedenen Methoden, mit denen Roboter- und Portalsysteme den Laserstrahl bewegen, führen zu unterschiedlichen Eigenschaften hinsichtlich Leistungsfähigkeit, Kosten und praktischer Umsetzung. Während einige Anwendungen mit beiden Systemen gleichermaßen gut bedient werden können, bietet in den meisten Fällen eine Technologie einen klaren Vorteil. Diese Entscheidung kann in der Regel unter Berücksichtigung der folgenden Faktoren getroffen werden:
- Flexibilität
- Präzision
- Geschwindigkeit
- Überlegungen zur Integration
- Programmierung
- Kosten
Schauen wir uns jedes dieser Elemente einmal genauer an.
Flexibilität
Roboterlasersysteme bieten eine weitaus größere Bewegungsflexibilität als Portalsysteme. Ein Roboterarm kann sich Teilen aus nahezu jedem Winkel nähern und eignet sich daher ideal für die Bearbeitung komplexer dreidimensionaler Geometrien oder Merkmale, die sich auf mehreren Seiten eines Teils befinden. Diese Fähigkeit ist besonders wertvoll bei Anwendungen wie der Automobilmontage, bei denen ein und derselbe Roboter möglicherweise Teile mit unregelmäßigen oder nicht ebenen Oberflächen bearbeiten muss.
Aufgrund ihrer eingeschränkten Bewegungsfreiheit eignen sich Portalsysteme in der Regel am besten für die Bearbeitung auf ebenen Flächen. Es können zusätzliche Bewegungsebenen hinzugefügt werden, um vertikale oder rotierende Bewegungen zu ermöglichen, jedoch wird dies niemals den Bewegungsbereich eines Roboterarms erreichen.
Wenn Teile komplexe 3D-Geometrien aufweisen oder wenn dieselbe Zelle eine Vielzahl von Teiletypen oder Ausrichtungen verarbeiten muss, sind Robotersysteme in der Regel die bessere Wahl.
Präzision
Portal-Lasersysteme bieten im Vergleich zu Roboterwerkzeugen in der Regel eine überlegene Präzision und Wiederholgenauigkeit. Ihre starren Linearbewegungsstufen, die geringe bewegliche Masse und die vereinfachte Kinematik ermöglichen eine hochpräzise Bahnsteuerung. Dies wird noch weiter verbessert, wenn das Portal und das Teil zusammen auf einer hochstabilen Plattform montiert sind.
Im Gegensatz dazu weisen Robotersysteme aufgrund von Gelenkauslenkung, Spiel und Kalibrierungsabweichungen größere mechanische Schwankungen auf. Dies verringert ihre Genauigkeit und Wiederholbarkeit im Vergleich zu Portalsystemen erheblich.
Die Genauigkeit von Robotersystemen kann durch zusätzliche Bildverarbeitungssysteme oder Kalibrierungswerkzeuge verbessert werden. Dies verlangsamt jedoch ihre Bewegung und erhöht zudem die Kosten und Komplexität.
Robotergesteuerte Lasersysteme bieten zwar ausreichend Präzision für viele Laserschneid-, Schweiß- und Reinigungsaufgaben, doch ihre begrenzte Genauigkeit kann das Prozessfenster einschränken. Daher sind sie in der Regel für anspruchsvolle Anwendungen in der Elektronik, Medizintechnik oder Batterieherstellung ungeeignet.
Geschwindigkeit
Die relative Geschwindigkeit oder Taktzeit von Roboter- und Portalsystemen hängt stark von der jeweiligen Anwendung ab. Portalsysteme sind jedoch in der Regel Roboter bei Aufgaben überlegen, die schnelle, sich wiederholende Bewegungen erfordern.
Portalplattformen können sich schnell entlang gerader und gekrümmter Bahnen bewegen und dabei die Geschwindigkeit präzise steuern. Dadurch eignen sie sich ideal zum Markieren, Schneiden oder Schweißen entlang durchgehender Konturen. Durch den Einsatz von OTF-Verarbeitung kann ihr Durchsatz weiter gesteigert werden.
Im Gegensatz dazu zeichnen sich Robotersysteme durch ihre Fähigkeit aus, komplexe 3D- oder mehrdimensionale Bahnen zu navigieren. Allerdings sind sie bei Start-Stopp-Vorgängen langsamer und bei schnellen Richtungswechseln weniger stabil. Ihre größere bewegliche Masse und ihre zahlreichen Gelenke verringern die Beschleunigungs- und Verzögerungsraten im Vergleich zu Portalsystemen.
Wenn die Anwendung eine gleichmäßige, kontinuierliche Bewegung über flache Teile erfordert, bieten Portale bessere Zykluszeiten. Bei mehrseitigem Zugang oder 3D-Konturverfolgung können Roboter jedoch insgesamt schneller sein, da keine Neupositionierung der Teile oder sekundäre Befestigungen erforderlich sind.
Überlegungen zur Integration
Die Konfiguration von robotergestützten Lasersystemen bietet von Natur aus eine größere Flexibilität für die Integration in komplexe oder platzbeschränkte Produktionsumgebungen. Ein Roboterwerkzeug kann neben einem Förderband positioniert, in einer kompakten Arbeitszelle platziert oder für die Bedienung mehrerer Stationen konfiguriert werden. Dadurch eignen sie sich hervorragend für Anwendungen, bei denen der Teilestrom, die Werkzeuganordnung oder die Prozessvielfalt adaptive Bewegungen erfordern.
Portalsysteme benötigen aufgrund ihrer starren Rahmenkonstruktion und ihres Überkopf-Bewegungssystems in der Regel eine größere Stellfläche. Der Zugang zu den Teilen erfolgt in der Regel vertikal, was die Integration des Systems in vor- oder nachgelagerte Prozesse einschränken kann. Für einfache Einzelanwendungen sind Portalsysteme jedoch oft einfacher zu implementieren.
Programmierung
Die für Laserautomatisierungssysteme verwendeten Programmierumgebungen variieren je nach Hersteller, sodass es schwierig ist, allgemeingültige Aussagen zu treffen. Im Allgemeinen sind Portal-Systeme jedoch einfacher zu programmieren und zu steuern, insbesondere für Benutzer, die bereits mit CNC-Geräten vertraut sind.
Die meisten Portalplattformen verwenden Standard-G-Code oder CAD-to-Path-Software. Diese generieren Werkzeugwege in absoluten, linearen Koordinaten innerhalb eines festen Maschinenreferenzrahmens.
Das bedeutet, dass der programmierte Weg direkt dem physischen Standort des Teils entspricht. Dadurch wird die Programmierung relativ einfach und intuitiv.
Robotersysteme erfordern dagegen eine komplexere Bahnplanung. Dies gilt insbesondere für 3D-Anwendungen oder wenn sich das Werkzeug aus unterschiedlichen Winkeln nähern muss.
Die Programmierung von Robotersystemen umfasst in der Regel 3D-Modelle. Die Bewegung muss sowohl relativ zum Bauteil als auch zur kinematischen Struktur des Roboters definiert werden.
Dies umfasst mathematische Transformationen zur Berechnung von Gelenkwinkeln, Werkzeugausrichtung, Reichweite und Kollisionsvermeidung. Daher erfordern Robotersysteme fortschrittlichere Softwaretools und ein höheres Ausbildungsniveau.
Glücklicherweise lassen sich die Risiken und die Komplexität von Roboterschweißprojekten mit Lasern mithilfe von virtuellen Konstruktions- und Simulationswerkzeugen und -techniken reduzieren.
Im Vergleich zu anderen robotergestützten Lasersystemen sind kobbotische Lasersysteme so konzipiert, dass sie wesentlich einfacher zu programmieren und zu bedienen sind. Da die Teileprogrammierung vergleichsweise einfach ist, erfordern laserbasierte Cobots keine Mitarbeiter mit vorheriger Robotererfahrung, um sie zu bedienen.
Kosten
Portalsysteme sind in der Regel kostengünstiger für die Bearbeitung einfacher, flacher Teile, bei denen ein hohes Maß an Präzision erforderlich ist. Aufgrund ihrer mechanischen Einfachheit und ihrer weit verbreiteten Verwendung in der Automatisierung sind sie für die Großserienfertigung vergleichsweise erschwinglich.
Roboterlasersysteme können mit höheren Anfangsinvestitionen verbunden sein. Dies gilt insbesondere für mehrachsige Roboter und wenn Sicherheitsvorrichtungen und Programmierwerkzeuge ebenfalls in die Kosten einbezogen werden.
Robotergesteuerte Lasersysteme bieten in der Regel einen höheren Mehrwert bei flexiblen oder vielseitigen Anwendungen. Es ist sogar möglich, einen Werkzeugwechsler zu verwenden, um den Bearbeitungskopf mit einem Roboterarm auszutauschen, sodass eine einzelne Zelle schneiden, schweißen oder andere Aufgaben ausführen kann. Dies kann den Bedarf an zusätzlicher Ausrüstung reduzieren und den ROI in einer Vielzahl von Produktionsumgebungen verbessern.
Erste Schritte mit einer Laserlösung
Letztendlich hängt die Wahl des richtigen Ansatzes für die Systembewegung von Ihrer Teilezusammensetzung, Ihren Leistungsanforderungen und Ihren Integrationsbeschränkungen ab.
Bei IPG Photonics bauen wir sowohl Roboter- als auch Portal-Lasersysteme. Der Einstieg in die Welt der Lasersysteme und -lösungen ist ganz einfach: Schicken Sie uns einige Musterteile, besuchen Sie eines unserer weltweiten Anwendungszentren oder erzählen Sie uns einfach von Ihrer Anwendung.